企业相关信息
企业名称:南京音飞储存设备(集团)股份有限公司
企业简介:
南京音飞储存集团是国际先进的智能仓储设备供应商。其子母车系统、四向穿梭车技术、多层穿梭车技术、地面轻型AGV技术、地面重型AGV技术、货到人拣选系统、WMS(仓库管理系统)软件、WCS(设备控制软件)系统等先进技术 ,以及近期研发出的旋转货架系统和轻型四向穿梭车、重型四向穿梭车等,不断丰富了自动化单机产品种类,进一步完善了“货架 +机器人=仓储系统解决方案”,产品在东南亚、澳洲、非洲、欧洲、美洲、中东亦有销售,为客户提供更智能高效的储存解决方案 。
企业Logo(图片):

启动会照片及全体合影(这里可以多加一些照片):


实习项目及分组(以项目组为单位提供以下信息)
项目一
项目名称:一款输送顶升移载机的设计
设计要求:
满足托盘90°顶升换向,托盘尺寸1200×1000,承载1000kg
托盘材料通用塑料、木制、钢制
输送速度12m/min,顶升高度40mm,机械传动
供电电压AC380V
小组成员:杨镯、王翊城、王建隆、倪土
实习心得:
通过晨会和晚会,认识到一个清晰的时间规划以及分工安排在合作与设计中的重要性,掌握了设计时序进度“甘特图”的制作。
认识到每一个零件的图面布置、结构设计、技术标注,都要考虑到工厂工人如何去进行加工。
设计的每一个零件,它都不是虚无缥缈的,而是要设计要构筑,要真真正正地应用到我们的实际生产中的。它不仅仅停留在软件里,或是图纸上,它也要呈现在我们的生活中。
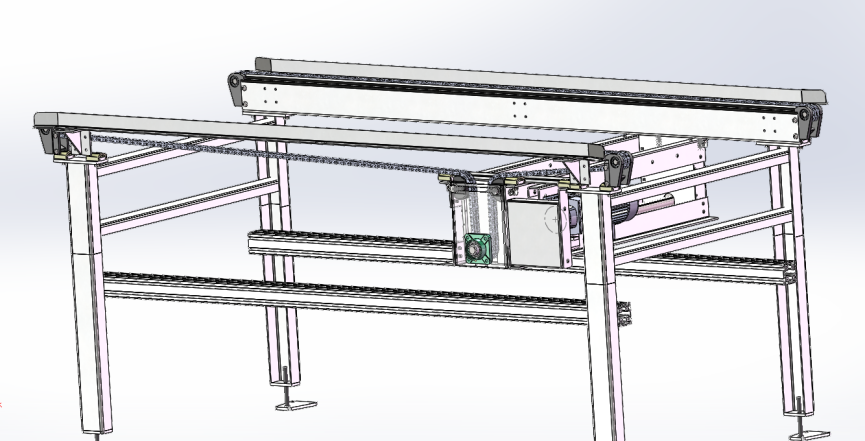
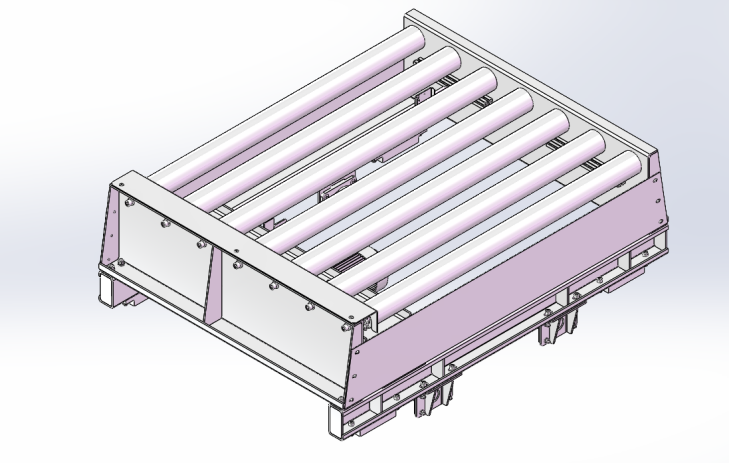
图一 链条输送机构 图二 滚筒输送机构
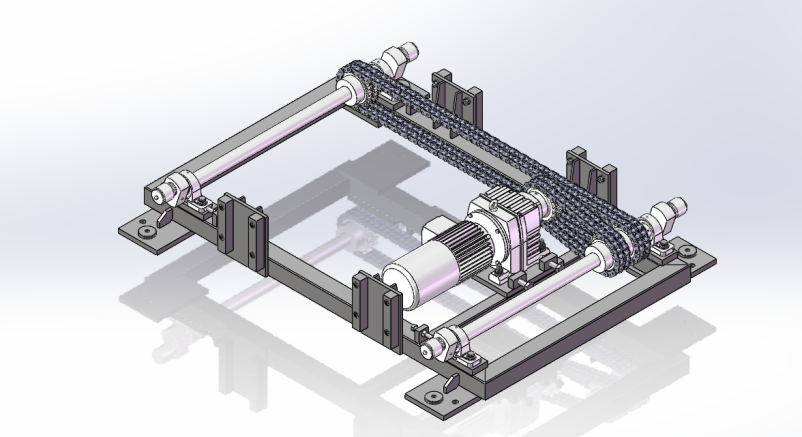
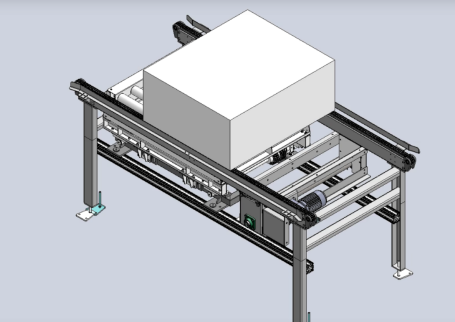
图三 顶升机构 图四 输送顶升移载机
项目二
项目名称:可四向移动轨道搬运机器人设计
小组成员:刘霄汉,高浩哲,卢昌林,祝忠博

项目简介:
对于所要设计的可四向移动轨道搬运机器人,在满足课题需求的前提下,对其进行课题研讨,细化需求;拟定可行性方案,出具草图;进行初步计算,确定主要参数和选型;小组分工,进行三维建模;小组分工,针对课题进行出图。
项目成果:
一、整体设计
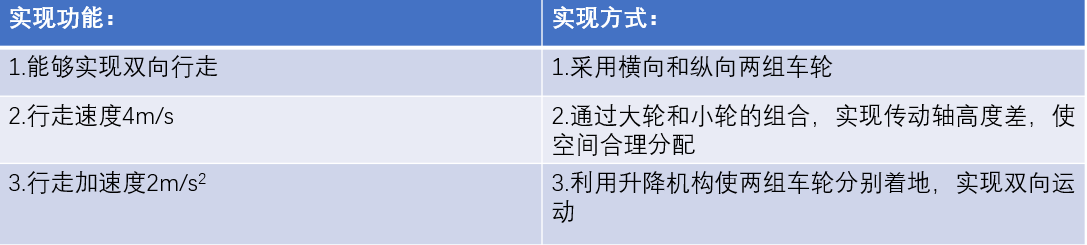
1.细化需求并拟定方案
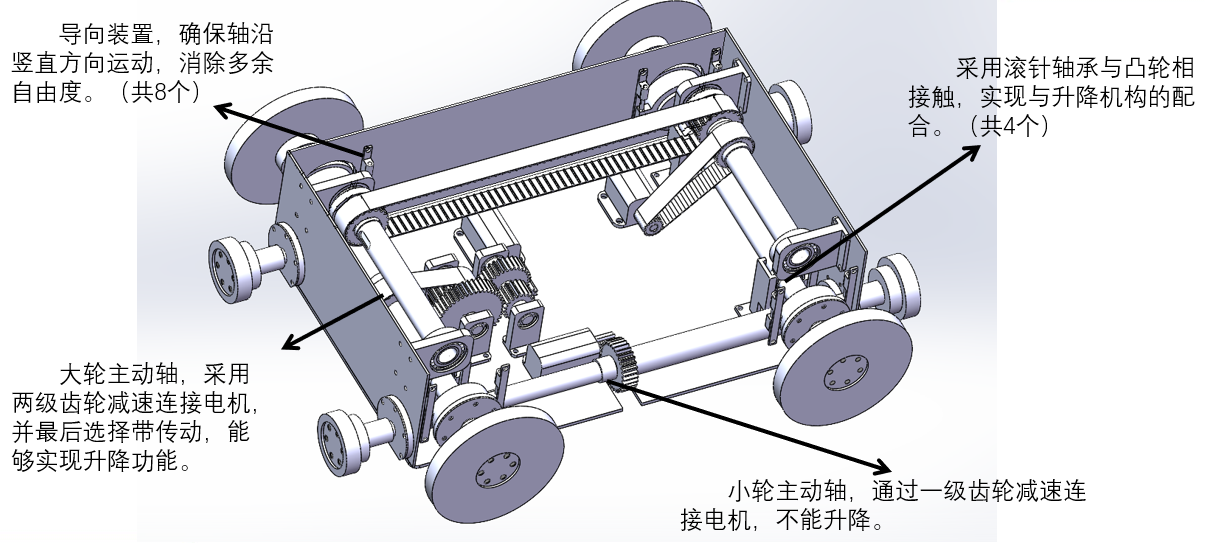
(1)X、Y方向移动——两组四对轨道轮
(2)移动方向切换——偏心轮抬升机构
(3)货物取放——同步多级伸缩机构+挡板
(4)整体布局设计、计算与装配
2.整体布局
3.初步计算

二、运动机构
三、抬升机构
1.既定目的:
使该机器人可以四向移动
2.实现功能:
通过该抬升机构,将大轮抬起,使其在最高点时仅有大轮着地,在最低点时只有小轮着地,大小轮交错布置实现四向移动。
3.选取结构:
凸轮机构,优点在于高速化,结构紧凑,可靠性高
项目三
项目名称:四向轨道搬运机器人的设计
项目简介:
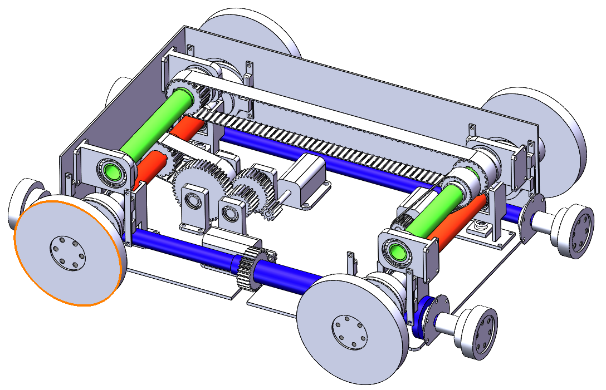
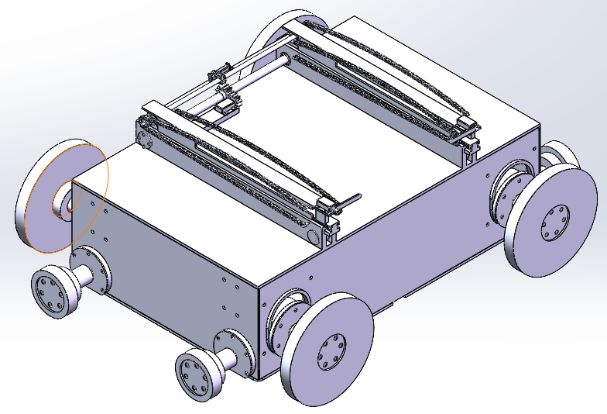
箱式四向穿梭车是一款在货架轨道上既能实现纵向行走,亦能实现横向行走,用于实现物料的出入库作业的智能搬运设备;其可将料箱取出,搬运至指定出口位置,同时可以将入口位置的料箱存放至指定的货位内。本项目需要设计一款应用于货架的轨道搬运小车,需要能够实现小车在货架之间的四向运动,及小车对货架上货物的拣取功能。
本项目对行走功能元采用麦克纳姆轮作为执行元件,可实现小车的四向行走;货物拣取功能元选用同步带、滑轮钢绳机构组合形成三级伸缩货叉配合叉板顶端拉钩实现。项目完成整车模型建立、关键参数计算校核以及关键零件图纸绘制。
小组成员:宋轩、朱昊、宋雨昂、胡学涛

项目成果:
四向物流小车关键结构设计。采用麦克纳姆轮作行走执行元件,设计相关轴系结构;选用同步带驱动一级货叉,与滑轮钢绳结构配合形成倍行程机构驱动二级货叉,并于叉板顶端配置拉钩结构。
四向物流小车模型的建立。完成了小车中驱动轮系、货叉同步带结构、货叉叉板、货叉拉钩和小车框架的模型建立。
关键零部件的选型和计算。对小车的采用电机以及关键结构选型计算。
小车关键工程图绘制。绘制了小车各轴、法兰等重要结构的零件图。
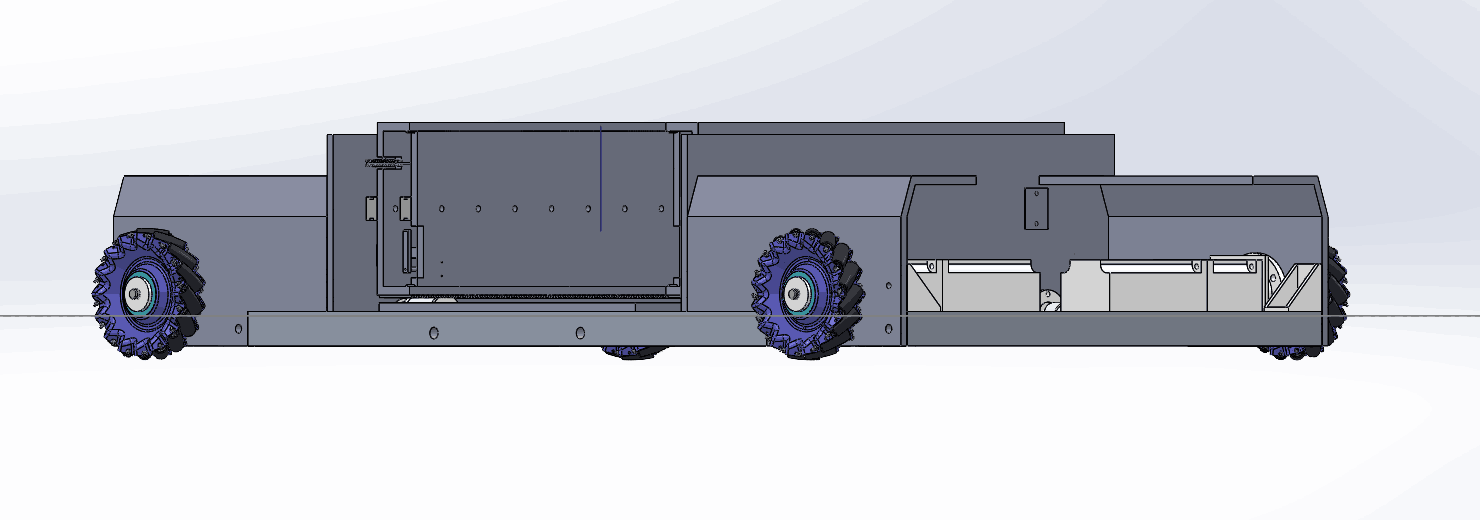
图 小车整体模型展示
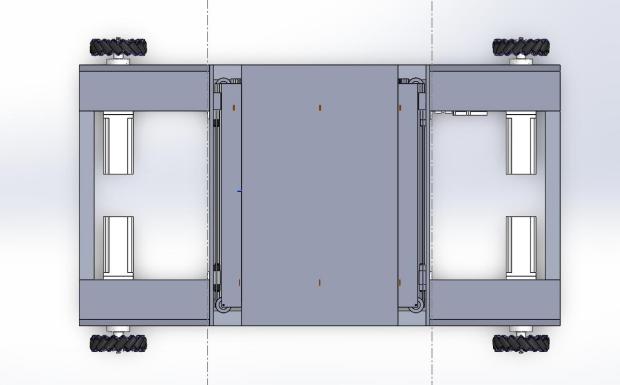
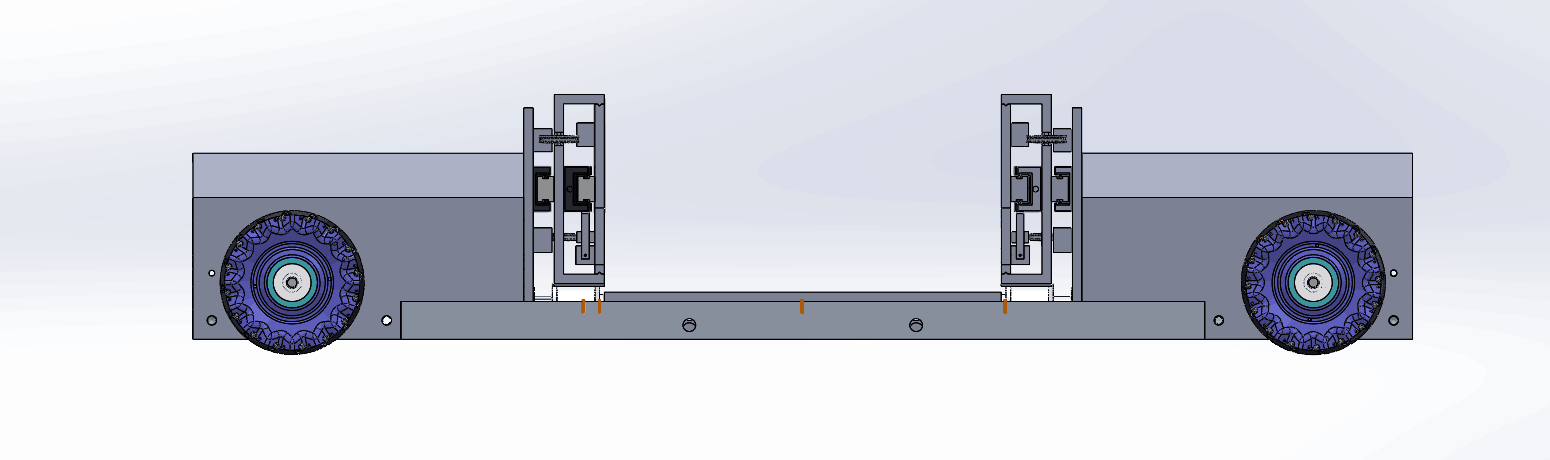
图 小车俯视图及侧视图